Настройка DSP в автомобиле. Измерения методом подвижного микрофона "MMM"
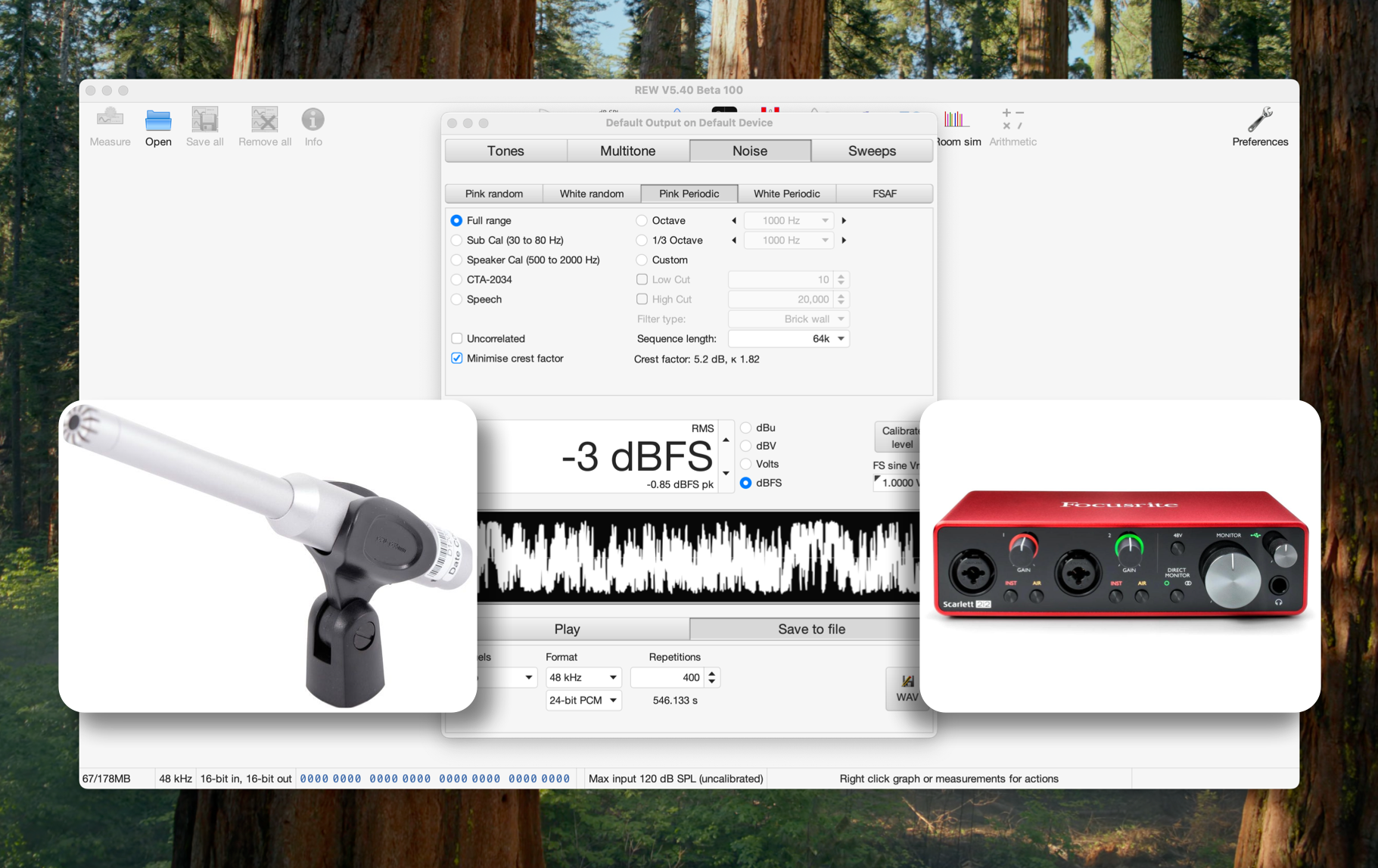
В предыдущем посте я разобрал выбор измерительного микрофона, процесс установки программного комплекса REW, подключения микрофона и подгрузки файла калибровки. Подготовили тестовый сигнал (периодический розовый шум) для воспроизведения с источника:
Теперь мы подготовимся к непосредственному выполнению измерений в автомобиле, и выполним замеры каждого отдельного динамика используя метод подвижного микрофона (MMM).
Метод подвижного микрофона / Moving microphone method (MMM)
Почему мы будем использовать метод подвижного микрофона (далее MMM), а не измерения микрофоном в статическом положении?
Я лично, в ходе настроечного процесса убедился, что очень тяжело получить один и тот же результат измерений с одной позиции в классической точке прослушивания в автомобиле. Стоит сместить микрофон на 2-3 см, и мы уже имеем другие данные на графике!
Особенность распространения звуковых волн в автомобиле заключается в том, что в точке прослушивания мы получаем волну не только напрямую от излучателя (динамика), но также и комбинацию отражений этой волны от различных поверхностей в салоне автомобиля, от лобового стекла, боковых стекол дверей, от пластиковых элементов центральных панелей автомобиля и обшивок дверей, и прочих элементов салона.
Прямая волна, её переотражения, и результат их совместной работы в точке прослушивания имеют различную амплитуду и фазовую характеристику, и они будут меняться в зависимости от положения, даже в рамках небольших отклонений о выбранной точки.
Например, в одной точке волна на частоте 3 кГц и её отражения могут сложиться и дать подъем относительно изначального уровня сигнала +3 дБ, но стоит нам переместить микрофон на 4 см влево, и в этой точке положение микрофона относительно бокового стекла изменилось, угол направления отраженной волны относительно точки замера также изменился, и фазовая характеристика отраженной волны тоже иная. В итоге в данной точке замера прямая и отраженная волны уже могут не складываться, а вычитаться (действие гребенчатого фильтра), и мы имеем уже не подъем уровня сигнала, а наоборот падение на -3 дБ.
Естественно, что результат сложения и вычитания волн и их конечная амплитуда в точке замера на каждой частоте будут свои, но нам же надо как-то это учитывать всё это при дальнейшей эквализации.
Одним из способов для нивелирования таких отклонений является выполнение целого цикла замеров одного динамика в разных локациях и направлении в точке прослушивания, и последующее усреднение полученных графиков программным способом, что известно как "пространственное усреднение измерений".
Я это делал в REW, выполнял порядка 30 замеров с поворотом микрофона влево/вправо, вверх/вниз, и затем делал операцию усреднения графиков. Это даёт более стабильный и повторяемый результат, но это долго и муторно.
В профессиональной среде для подобных измерений в реальном времени используют оснастки сразу с несколькими микрофонами, размещенных в разных точках в области головы слушающего, и соответствующее программное обеспечение (Smaart), например вот так:

Однако подобный метод с последовательным получением графиков и последующим усреднением всё равно имел значительный недостаток - изменения тонального баланса или позиционирования центрального образа от поворота или наклона головы. Повернул голову немного в сторону, и где-то начинает неприятное выстреливать, отражение это или нет, надо разбираться. А как, если непонятно в каком точно положении такое отклонение можно зафиксировать?
Как оказалось, все эти неприятные моменты можно избежать, используя метод подвижного микрофона, который заключается в том, что мы будем:
- находиться непосредственно в точке прослушивания (а наличие тела в салоне в конкретном месте очень сильно влияет на отражение и поглощение волн и результат их совместной работы, как оказалось, даже расположение замерщика просто на заднем диване влияет на результат в точке прослушивания);
- держать микрофон в руке, а в ходе измерения, и постоянного усреднения в REW, мы будем перемещать микрофон от одного уха к другому и фиксировать амплитуду всего измеряемого частотного диапазона в области лица и ушей.
Данный метод даст нам максимальную повторяемость при повторных замерах АЧХ, например для сравнения замера конкретного динамика в полную полосу, и после применения кроссовера или эквалайзера. Мы можем сделать одни замеры вечером, затем сесть утром, выполнить повторные замеры и получить тот же результат.
Плюс, после настройки, конечный результат у нас не будет зависеть от поворота головы, наклона, так как все подъемы и провалы в области головы учтены, и будут скорректированы в ходе дальнейшей эквализации, при этом дальнейшее сглаживание неравномерностей будут уже делать наши уши, они в связке с мозгом хорошо это умеют, но резко реагируют на резкие всплески АЧХ, которые мы как раз и устраним.
Подготовка процессора (DSP) к измерениям:
Запустив ПО для настройки процессора (в нашем случае для примера мы будем использовать Hellion HAM 8.10DSP), нам необходимо настроить источник для DSP и конфигурацию каналов входных и выходных.
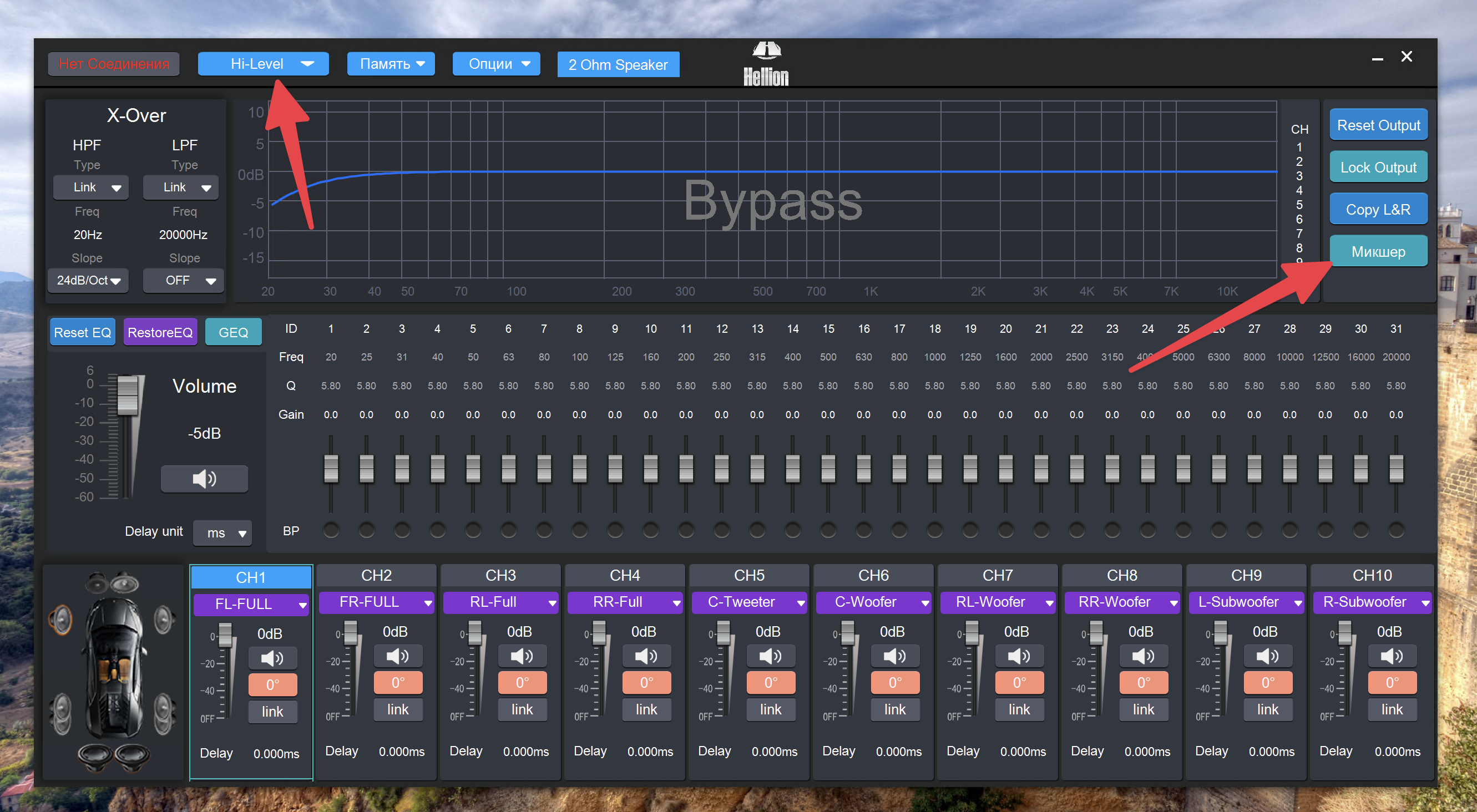
Нам потребуется открыть окно "Микшер" и выполнить конфигурацию, назначить какой канал входа будет направлен на какой канал выхода. Обычно достаточно только двух входных каналов, например левый и правый канал с ГУ, для соответствующего распределение на левые и правые динамики, которые мы будет подключать к процессору (процессорному усилителю):
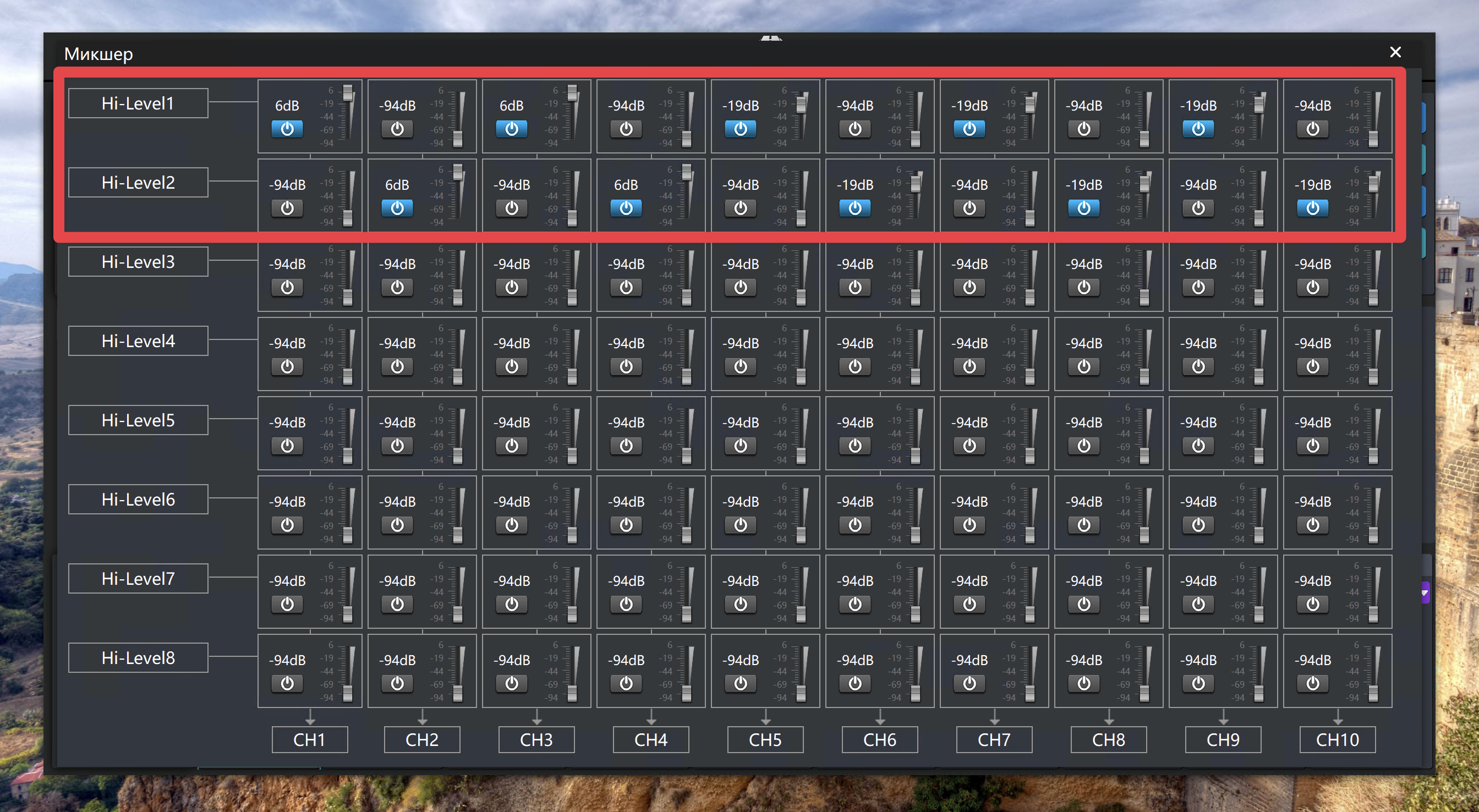
В данном примере мы направляем входной левый канал с ГУ Hi-Level1 во все нечетные каналы, которые мы назначим всем левым динамикам (CH1, CH3, CH5, и т.д.). А входной правый канал Hi-Level2 на все четные выходные каналы, которые мы назначим всем правым динамикам (CH2, CH4, CH6, и т.д.).
Закрываем данное окно и переходим к конфигурации каждого выходного динамика:
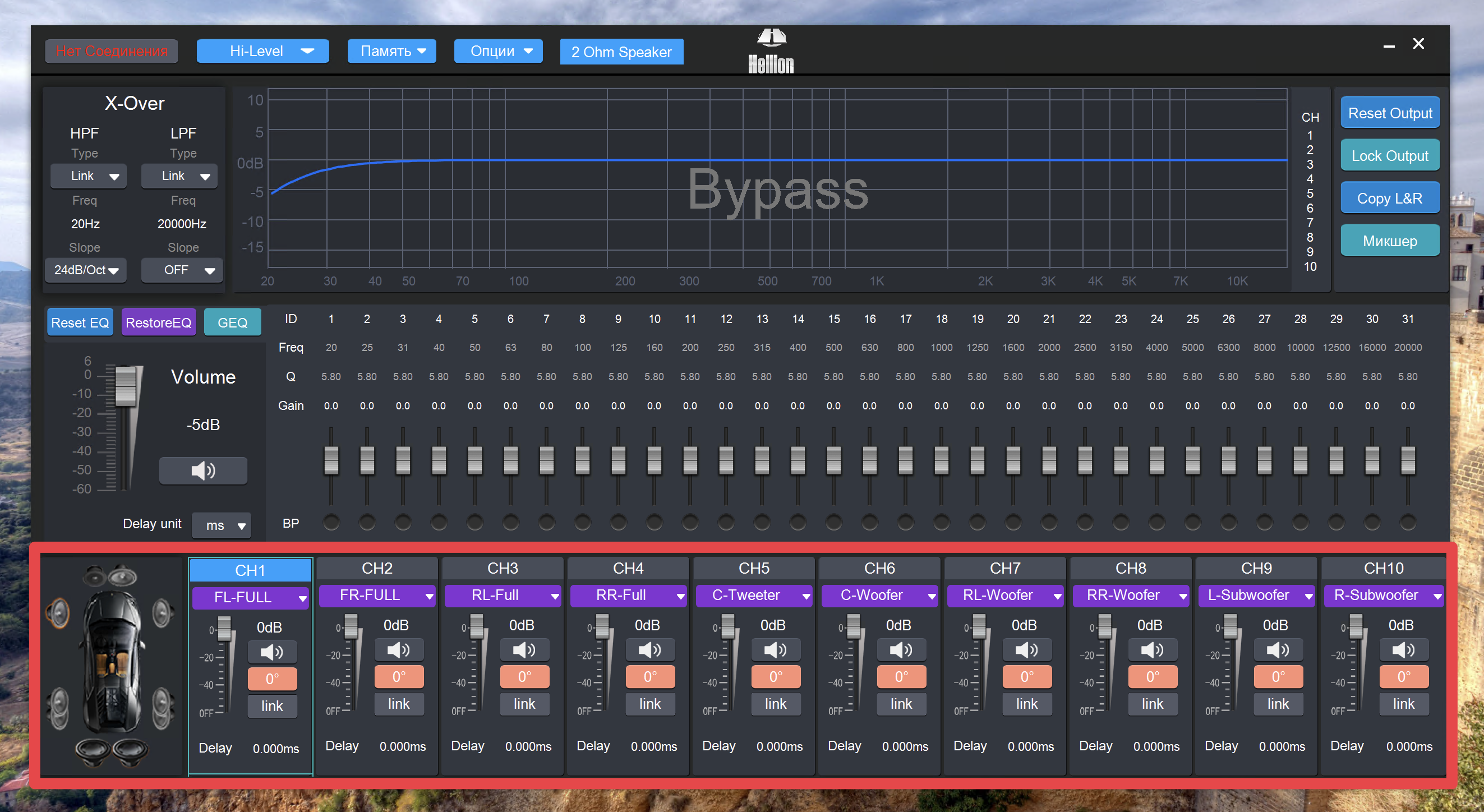
Допустим мы решаем, что у нас будут задействованы следующие динамики в системе:
- твитеры (левый и правый канал);
- мидбасы (левый и правый канал);
- сабвуфер (левый и правый канал, которые затем суммируются в моноблоке сабвуфера);
Настраиваем назначение каналов следующим образом:
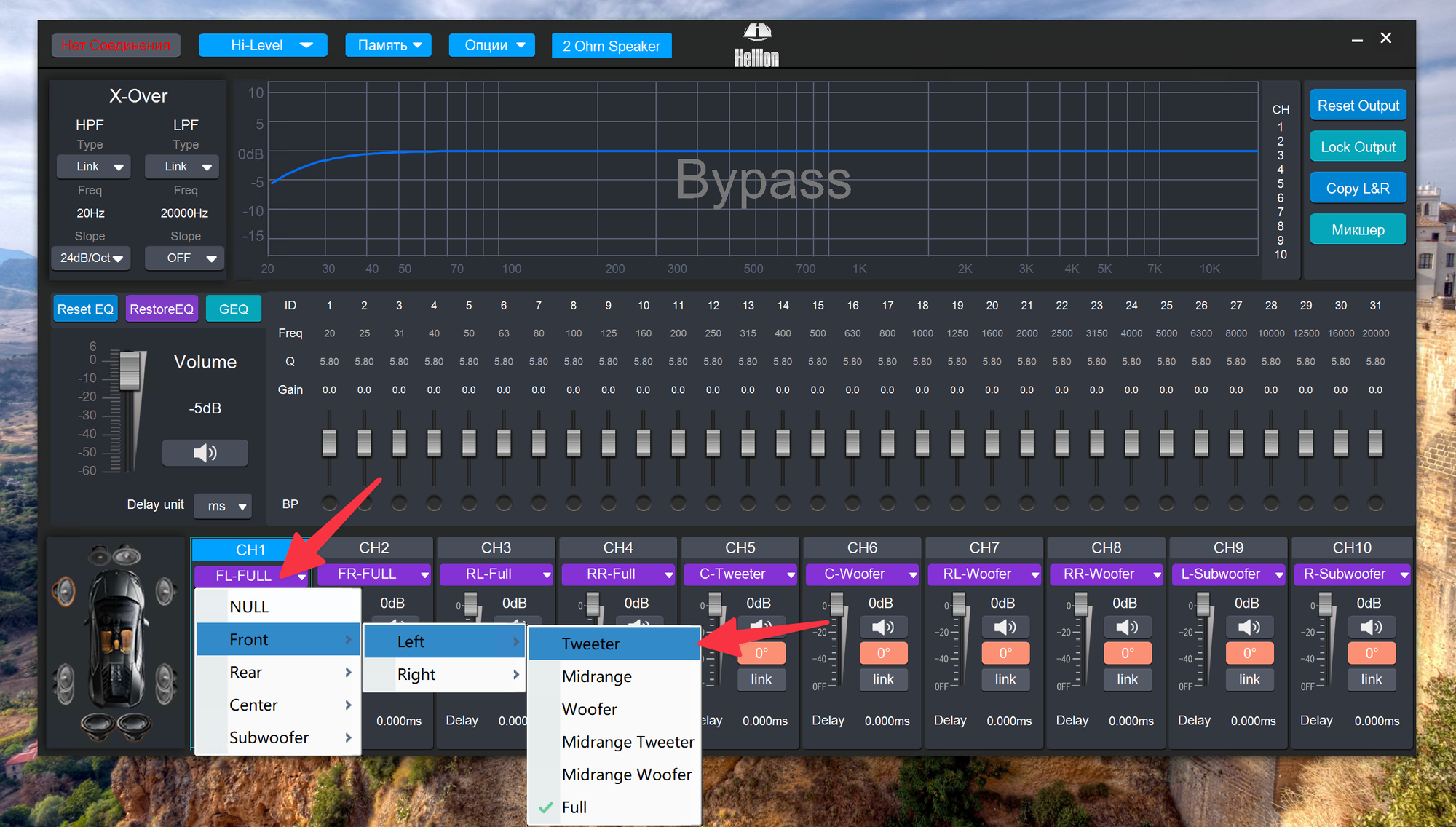
Выполняем конфигурацию по выбранной нами ранее схеме, при этом неиспользуемые каналы можно отключить (назначить им "NULL"):
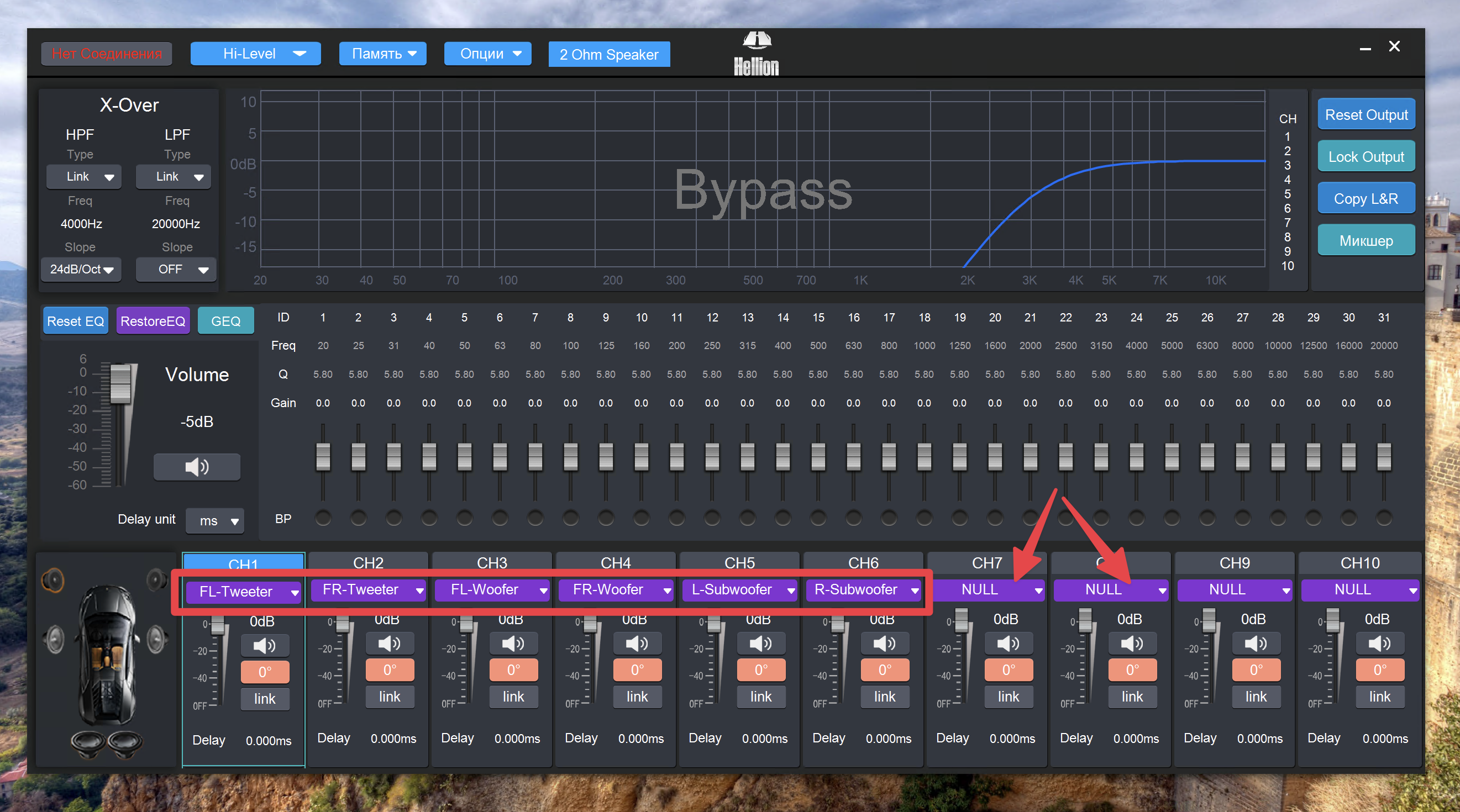
При переходе на каждый канал, мы видим, что ПО автоматически установило дефолтные значения кроссоверов для каждого конкретного канала, и нам они совсем не подходят, а некоторые и не нужны на данном этапе.
Сейчас мы будем делать измерения всех динамиков в полную полосу, в максимально широком диапазоне, для того чтобы проверить, что они демонстрируют в нашем автомобиле в конкретном месте установки (а результаты будут очень сильно отличаться от красивых графиков этих динамиков в журнальных статьях). Используя измерения в полную полосу, мы затем сможем определиться, какие кроссоверы мы в итоге будем для них применять.
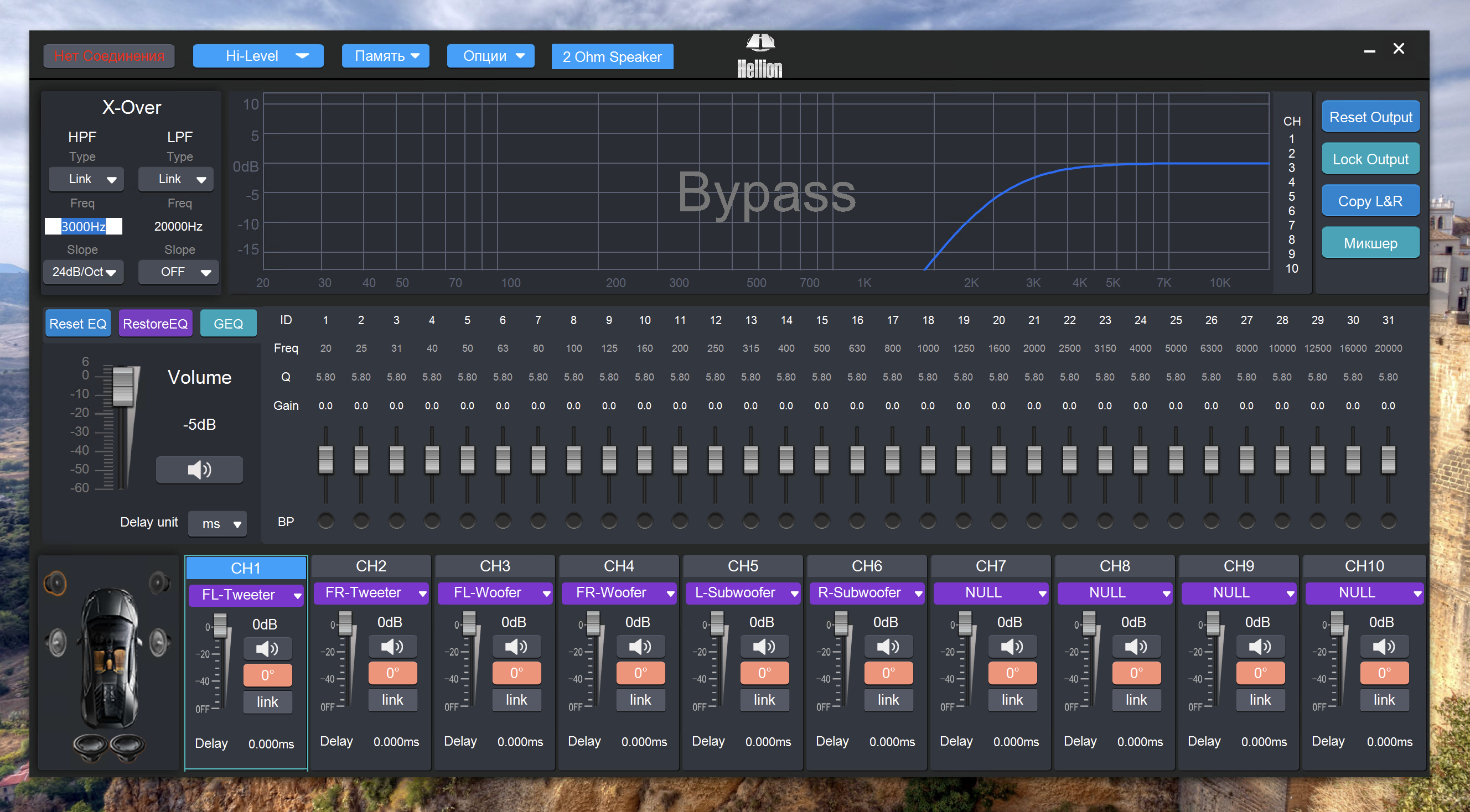
Выбираем HPF фильтр для твитера:
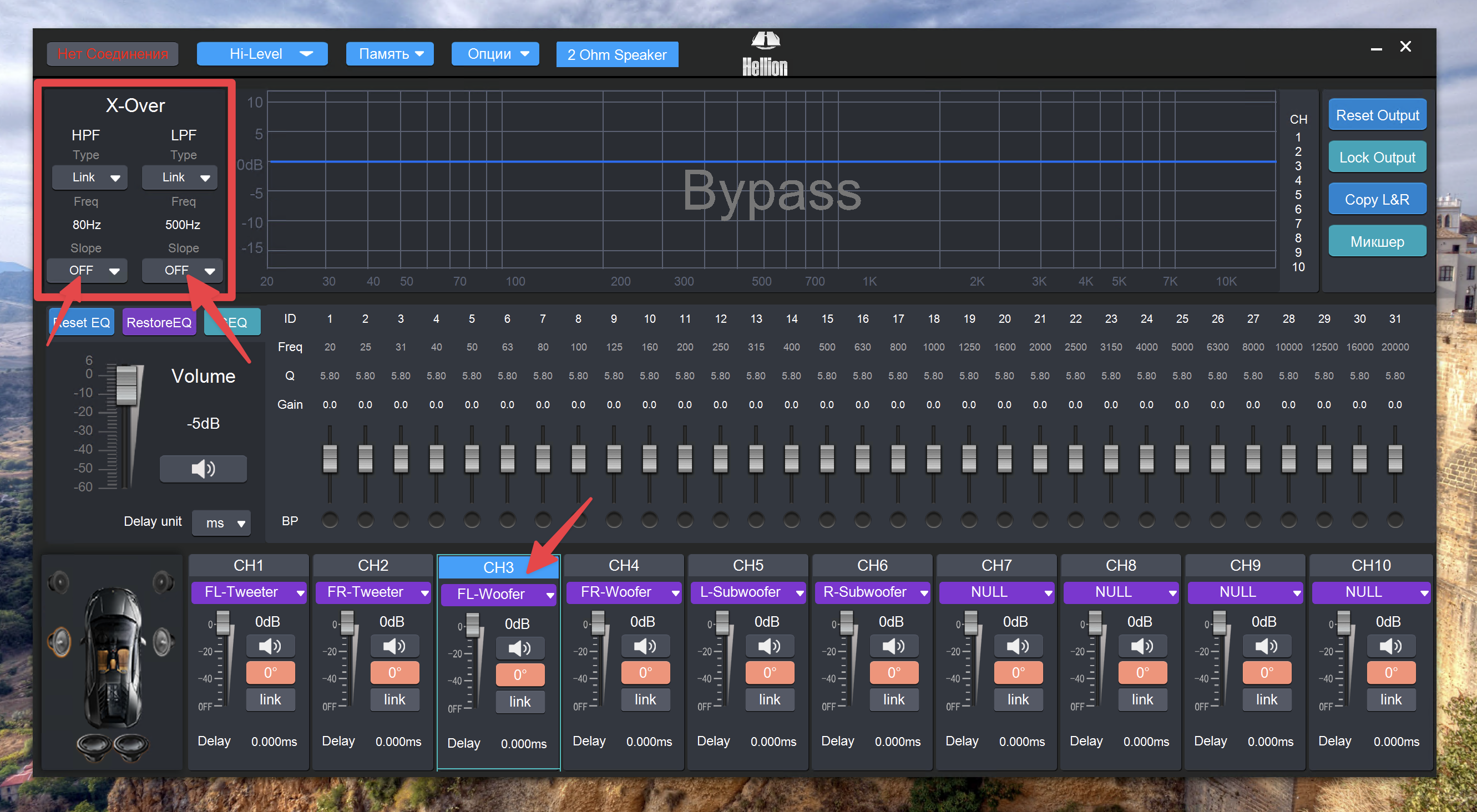
Отключаем кроссоверы для мидбасов и сабвуферных каналов:
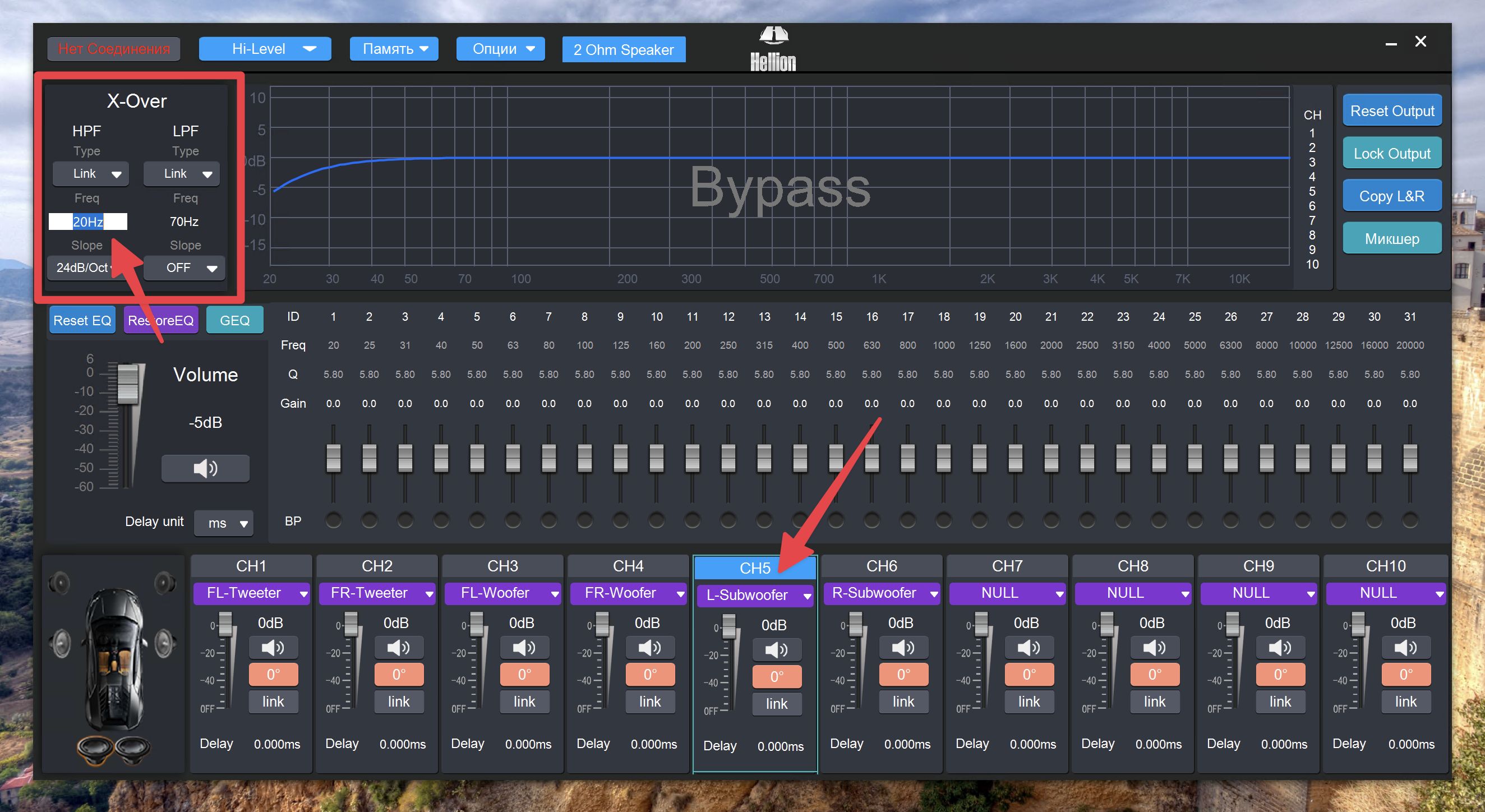
Для владельцев сабвуферов с фазоинвертором полезным будет добавить HPF фильтр 20-25 Гц 24 dB/oct Linkwitz–Riley в качестве Sub-sonic фильтра, чтобы не издеваться на сабвуферной головкой далеко ниже частоты настройки порта, где уже нет никакого контроля динамика у усилителя. Для владельцев сабвуферов в оформлении "закрытый ящик (ЗЯ)" это делать не требуется, так как демпфирование динамика выполняет уже само оформление.
Не забудьте выполнить одинаковые настройки для каждой пары каналов, левого и правого.
Выполнение замеров подвижным микрофоном в окне RTA в REW:
Перед началом измерений настроим окно RTA в REW следующим образом:
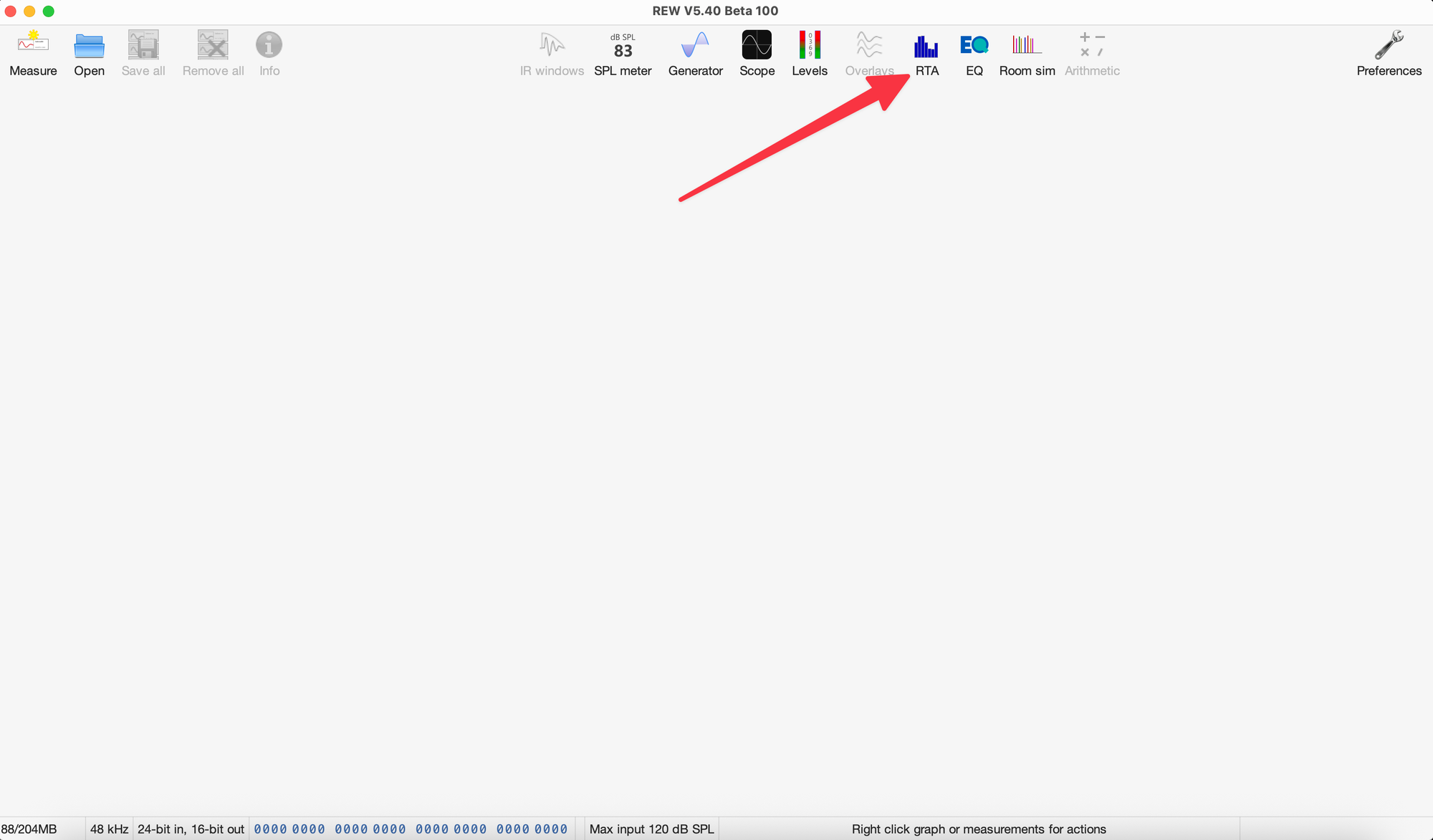
Открываем окно RTA:
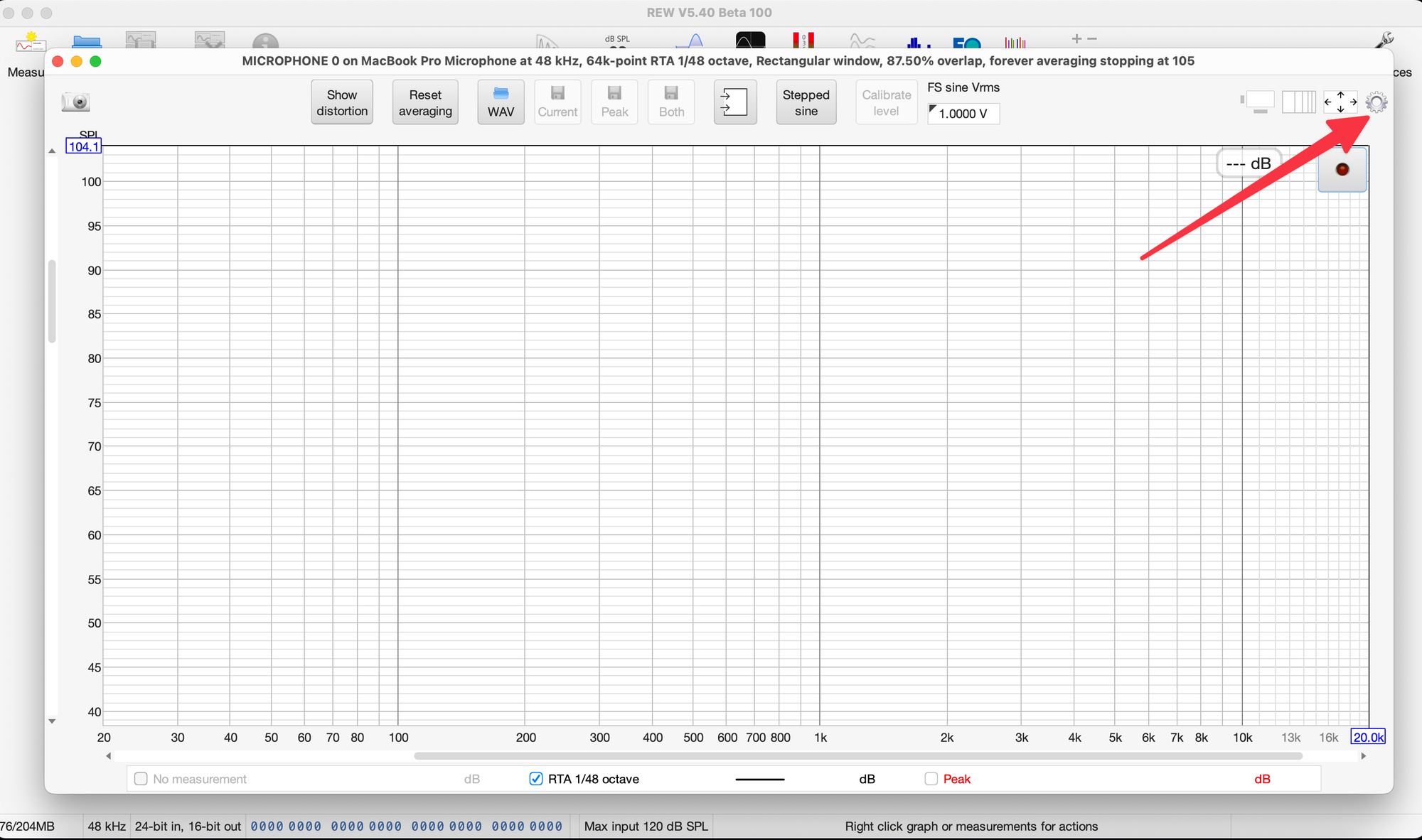
Открываем настройки окна RTA:
Выставляем следующие настройки окна RTA:
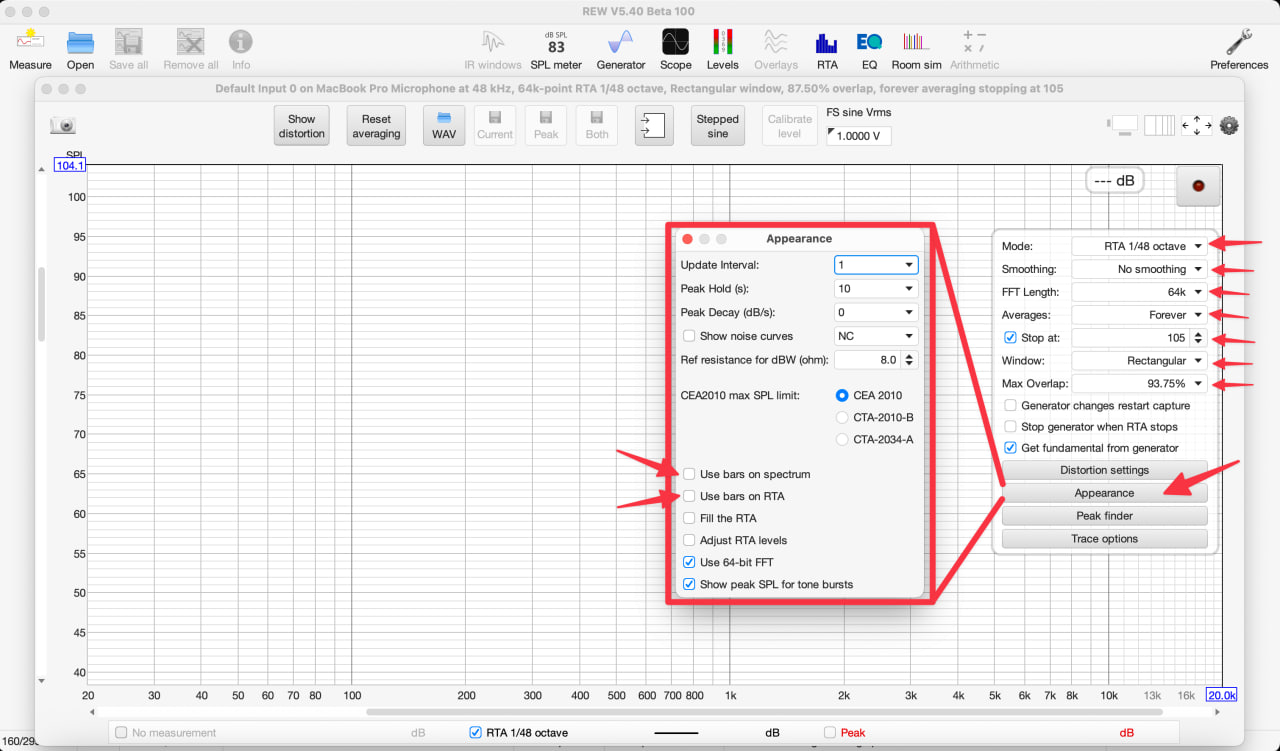
- Mode:
RTA 1/48 octave(замер будем делать с минимальным сглаживание, чтобы получить полную картину происходящего); - Smoothing:
No smoothing; - FFT length:
64k(оптимальный баланс точности и производительности, вспомним, что при создании периодического розового шума мы также использовали 64k последовательность, что даёт нам быструю стабилизацию графика и облегчает усреднение); - Averages:
Forever(выполнять постоянное усреднение в реальном времени); - Stop at:
100Данным параметром мы определяем, на каком количестве циклов усреднения остановить запись и зафиксировать результат. Для разных динамиков будут достаточны следующее количество усреднений:- Твитеры/Ширики - 90-100;
- Мидбас/СЧ - 70-80;
- Сабвуфер: 40-50;
- Window:
Rectangular(В основном с розовым шумом используют окно Hann, но c периодическим розовым шумом, который применяем мы, необходимо использовать окно Rectangular); - Max overlap:
93,75%
В дополнительном окне настроек "Appearance" я также отключаю:
- Use bars on speсtrum: галку снять;
- Use bars on RTA: галку снять;
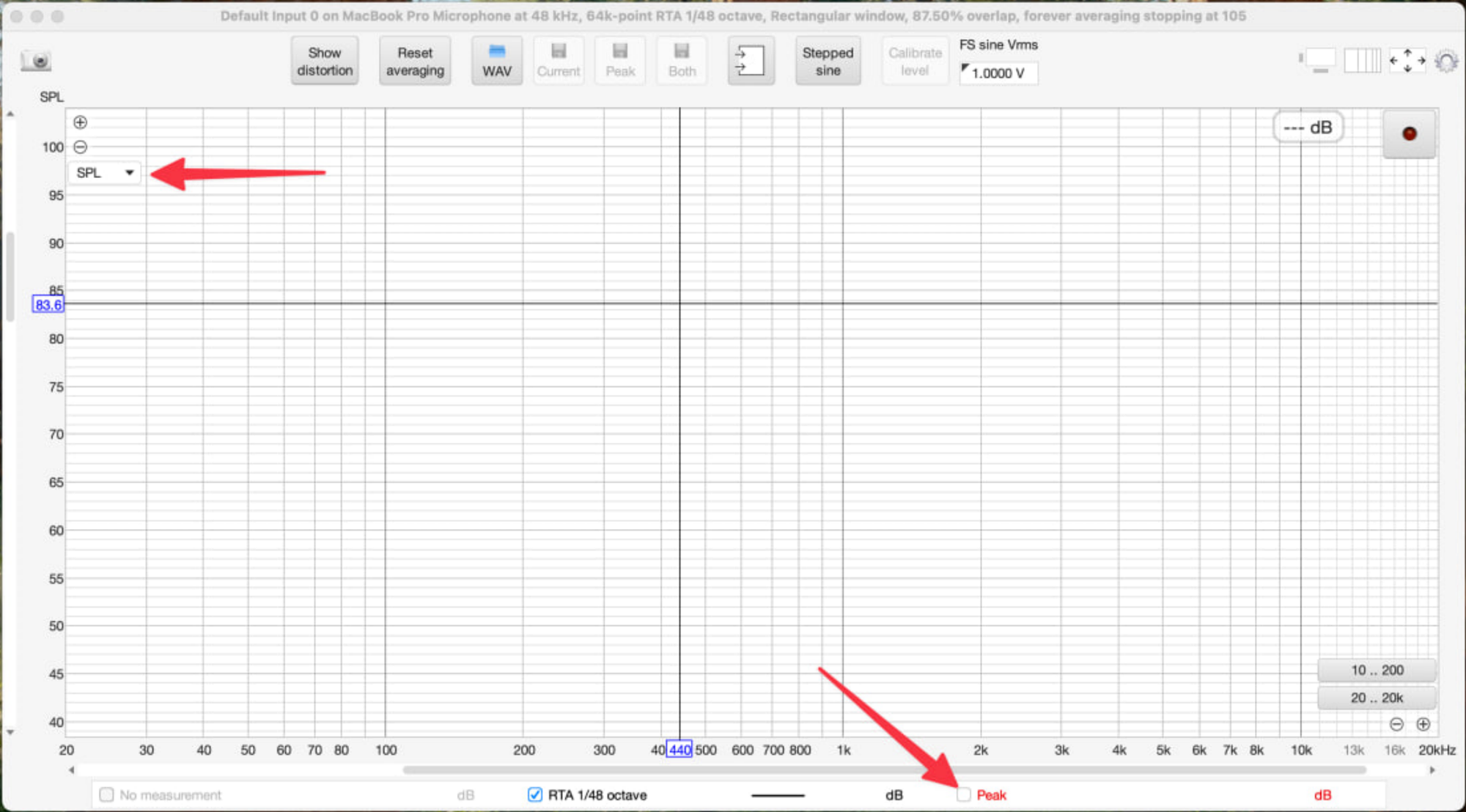
Проверяем что у нас в окне RTA шкала в SPL, а график пиковый значений "Peak" внизу окна отключен, он нам будет только мешать:
В окне ПО для настройки процессора отключаем все каналы (кнопкой Mute), оставляем только один канал динамика, который будем измерять:
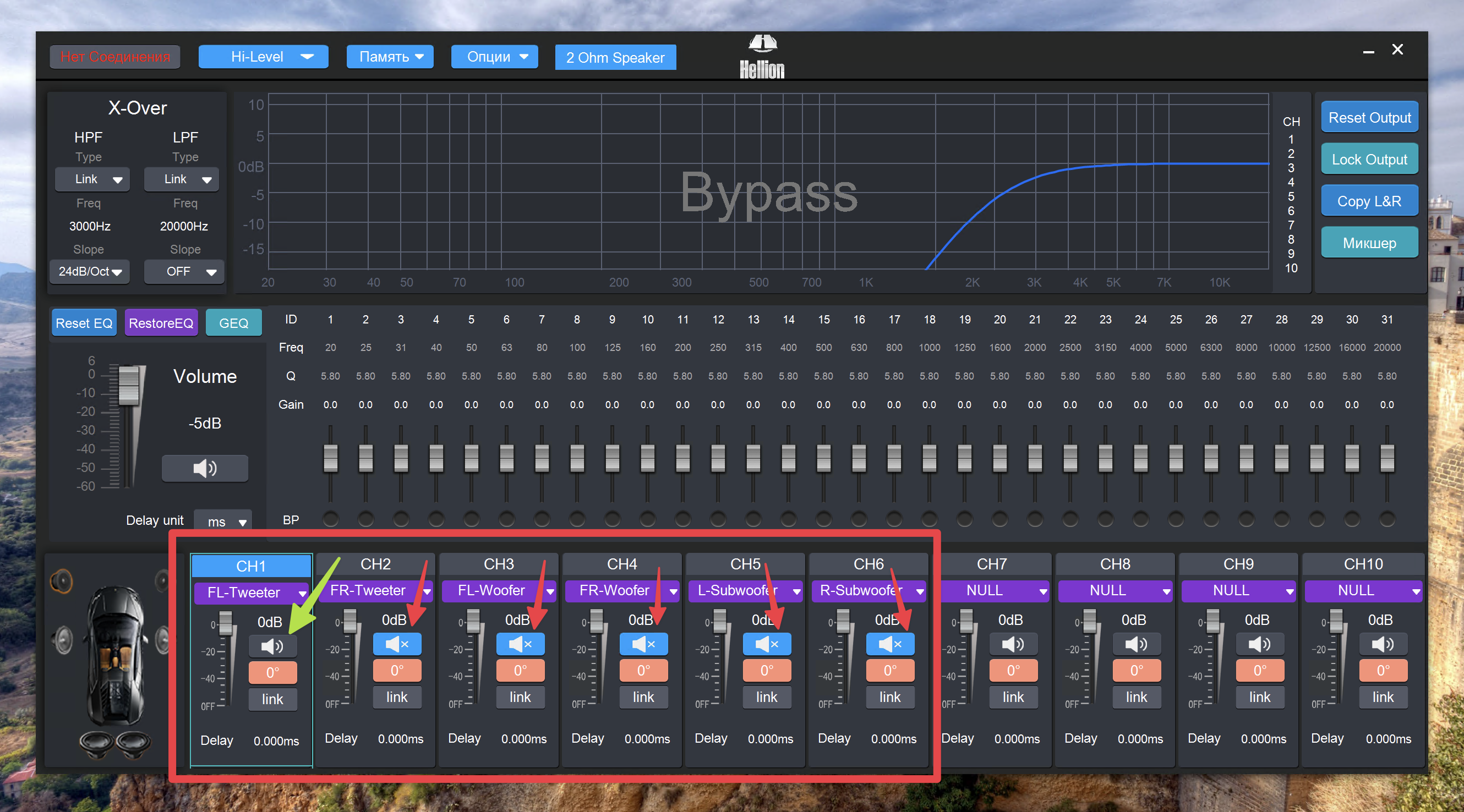
В ходе измерений меняем на следующий измеряемый канал, включаем его, остальные выключаем. Выполняем сначала замеры твитеров (начинаем с левого), затем мидбасов, потом сабвуфера.
Приступим к замеру.
- во время выполнения измерений садимся на водительское место (рассчитываем, что это и есть основное место прослушивания);
- изначально нам необходимо замерить первоначальный уровень текущего шума в автомобиле, для того чтобы понять, какую громкость тестового сигнала нам требуется настроить для наших измерений. Поэтому:
- держим микрофон в руке;
- включаем запись в окне RTA.
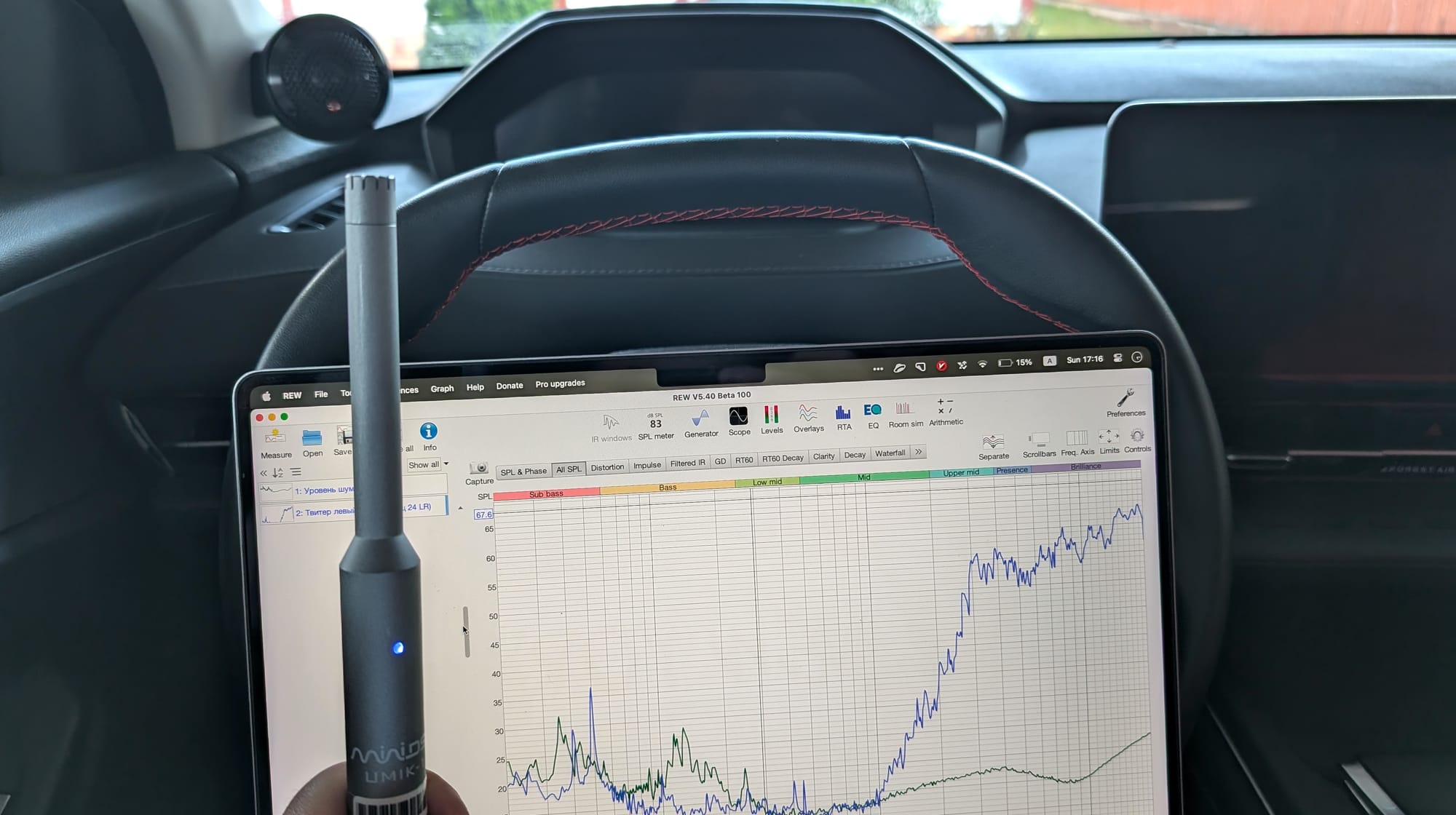
- мы увидим показания текущего уровня шума в салоне и стабилизацию графика:
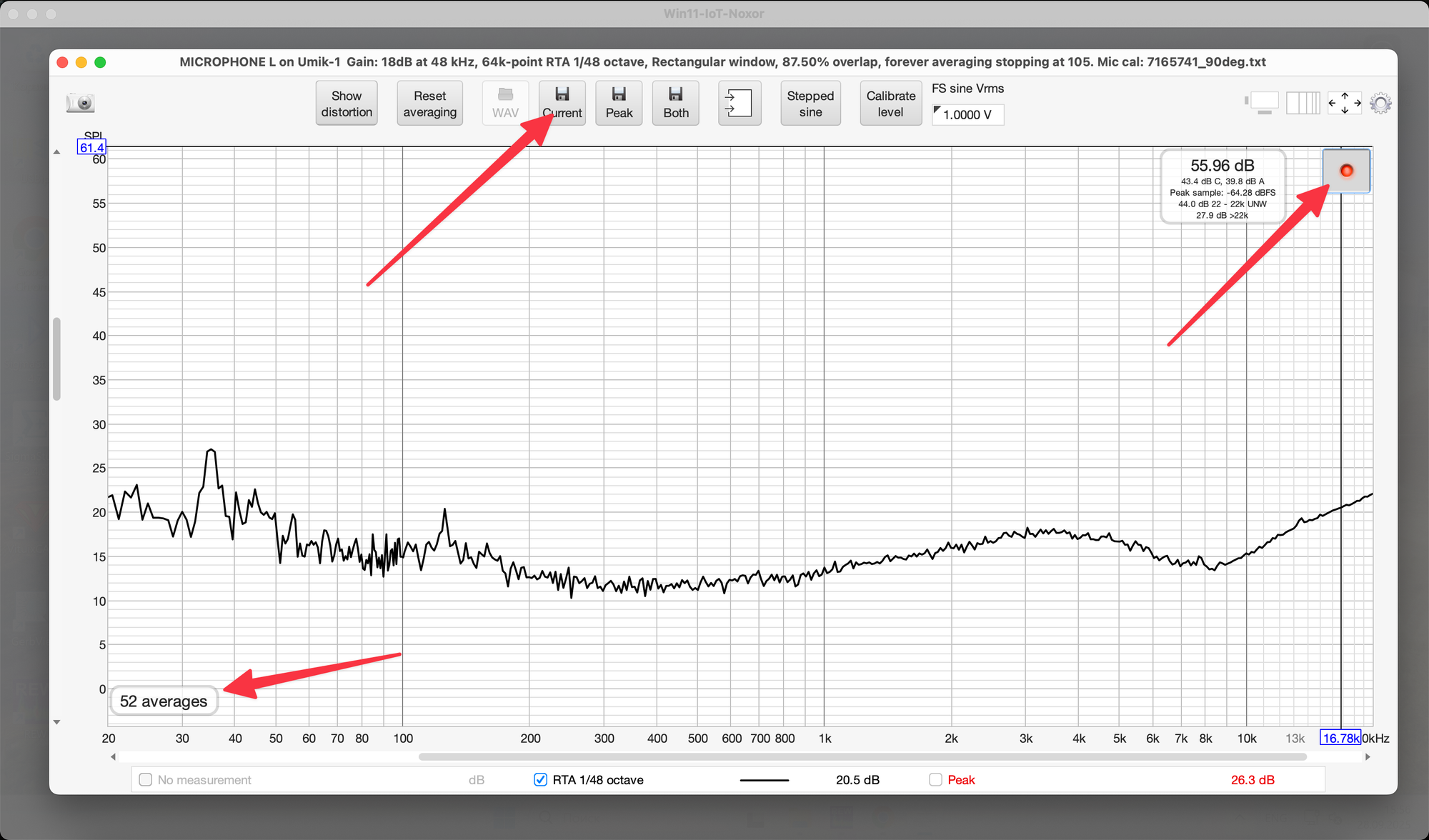
- после завершения отсчета усреднения в левом нижнем углу сохраняем график шума с помощью кнопки "Current";
- запускаем с источника (ГУ) периодический розовый шум (как раз тот, что мы подготовили в рамках прошлого поста);
- нажимаем опять кнопку записи в окне RTA. Мы опять увидим начало отсчета усреднений и текущий график АЧХ конкретного активного динамика.
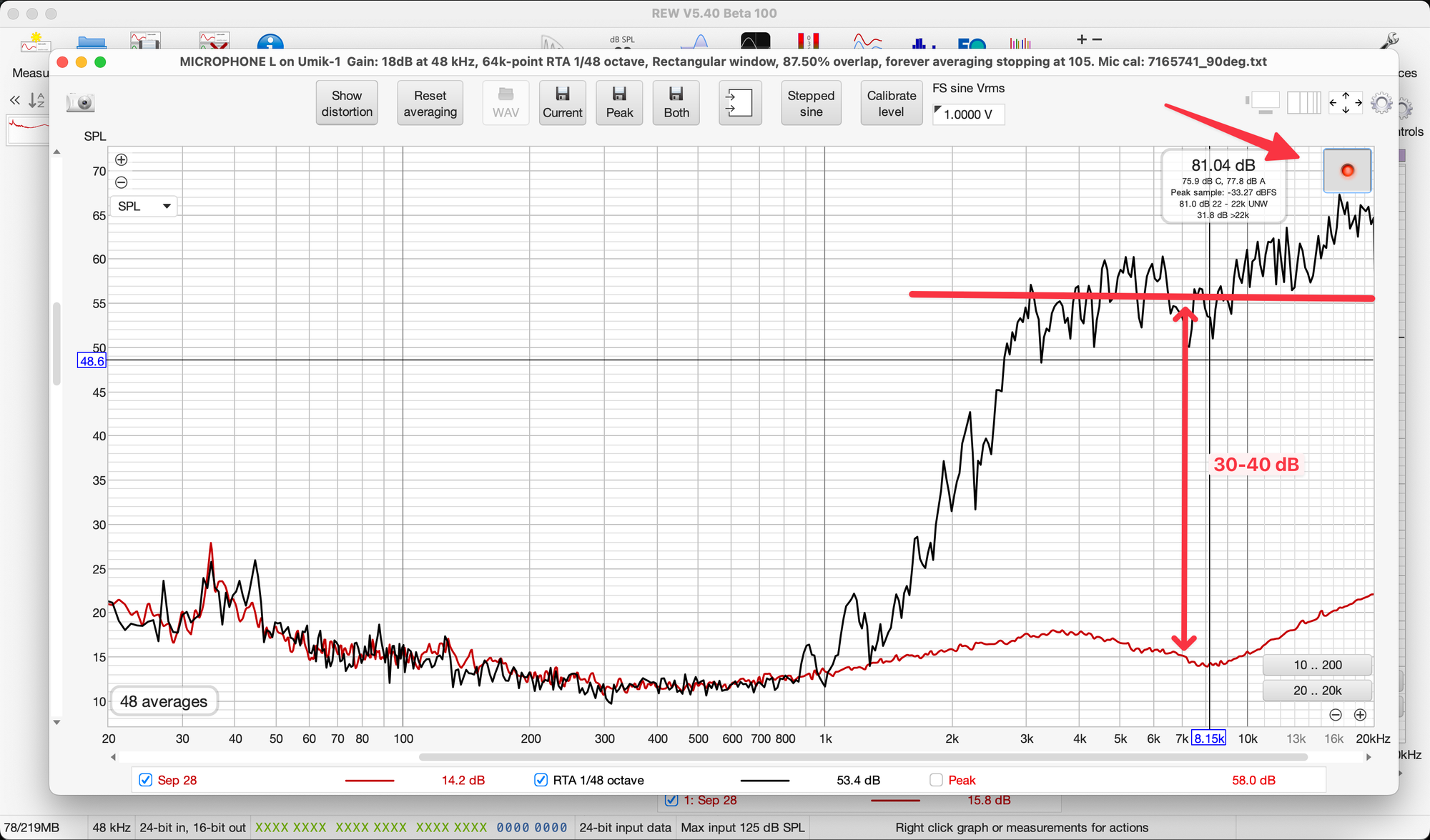
- нам требуется задать такой уровень громкости сигнала с ГУ, который будет на большей части частотного диапазона выше уровня шума (который мы замерили ранее) на 30-40 дБ. Обычно считается, что если мы будем применять кроссоверы 24 db/oct, то нам хватит и разницы и 25 дБ, но чаще происходит так, что в ходе эквализации нам надо снизить целевой уровень АЧХ динамика, и тогда шум уже будет мешать в работе при эквализации. Для себя я определил, что 30-40 дБ является удобным значением;
- выставили нужную громкость с ГУ, заполнили это значение, мы его будем использовать для замеров всех динамиков, и даже для будущих контрольных замеров, оно у нас будет опорным;
- далее приступаем к замеру отдельного динамика;
- опять запускаем с источника (ГУ) периодический розовый шум;
- берем измерительный микрофон в руку, направляем вверх (если с микрофоном шел калибровочный файл для положения 90°, то подгружаем в настройках микрофона и используем его);
- используем окно RTA в REW, запускаем запись с включенной функцией автоматического усреднения полученных данных в реальном времени.
- начинаем перемещать микрофон в руке от одного уха к другому, у каждого уха делаем пару круговых движений вокруг уха (по оси ушных каналов) и затем перемещаемся к другому уху, делаем пару круговых движений вокруг уха, и опять возвращаемся к другому уху;

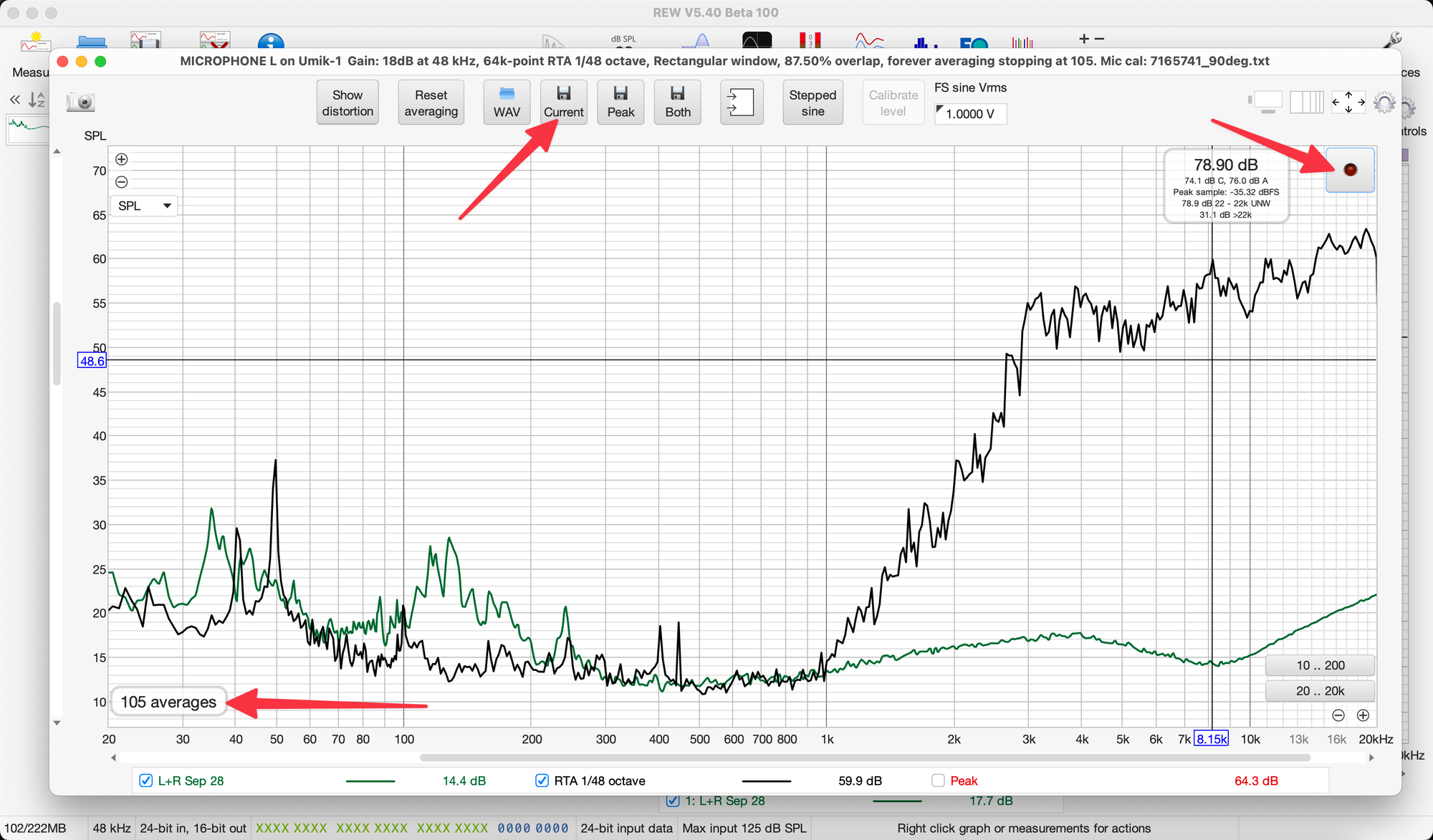
- пока мы перемещаем микрофон REW делает усреднение всех полученных данных в окне RTA, и после 7-8 циклов перемещения микрофона мы уже заметим стабилизацию графика текущего измерения, он перестанет изменяться.
- по завершению отсчета усреднений (в моём случае 105) в окне RTA запись остановится сама, и нам потребуется сохранить полученный график опять кнопкой "Current":
Можно переключить в процессоре на новый канал, сделать замер следующего динамика, и опять, по результатам перемещения микрофона и усреднений в окне RTA, выполнить сохранение графика.
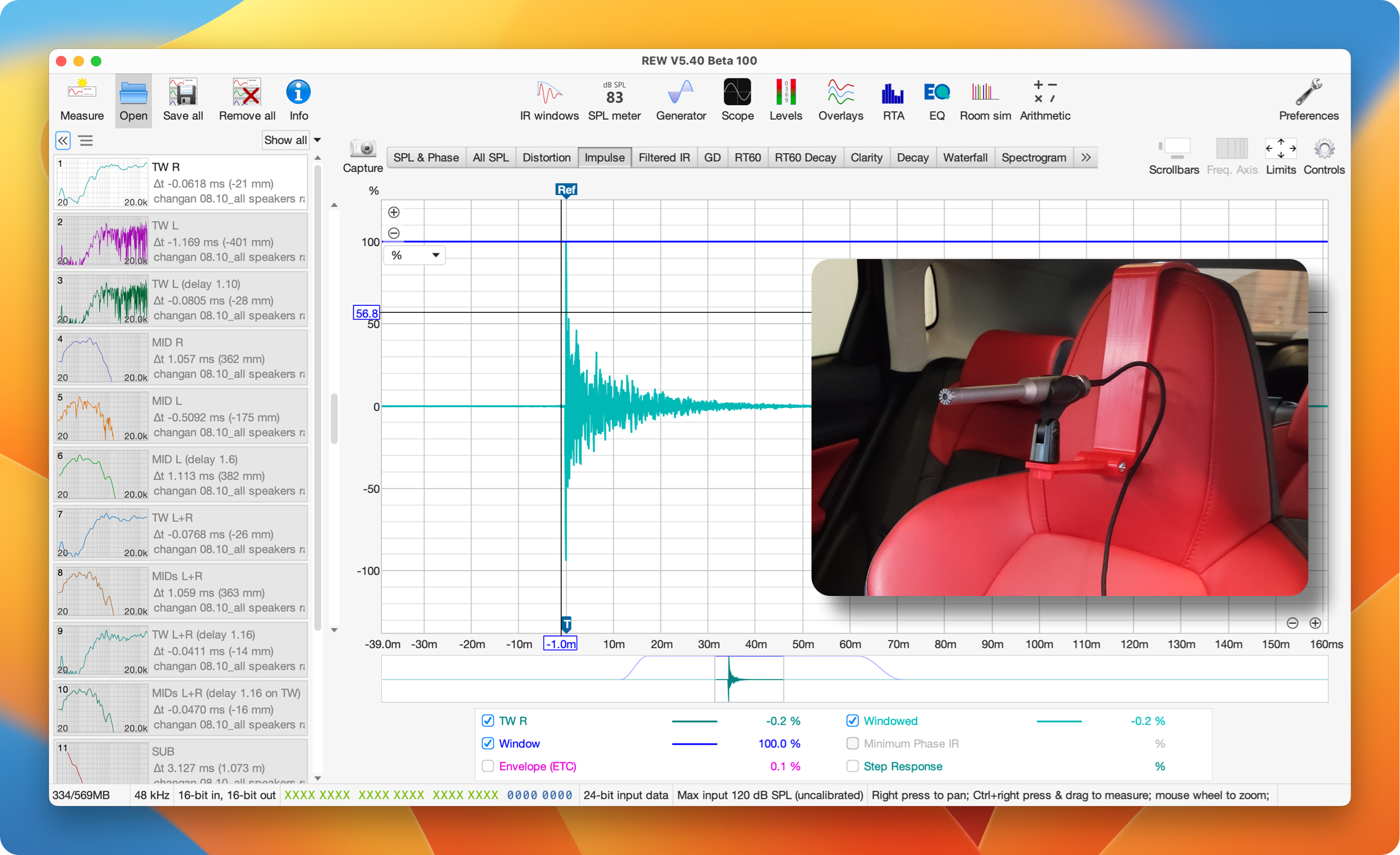
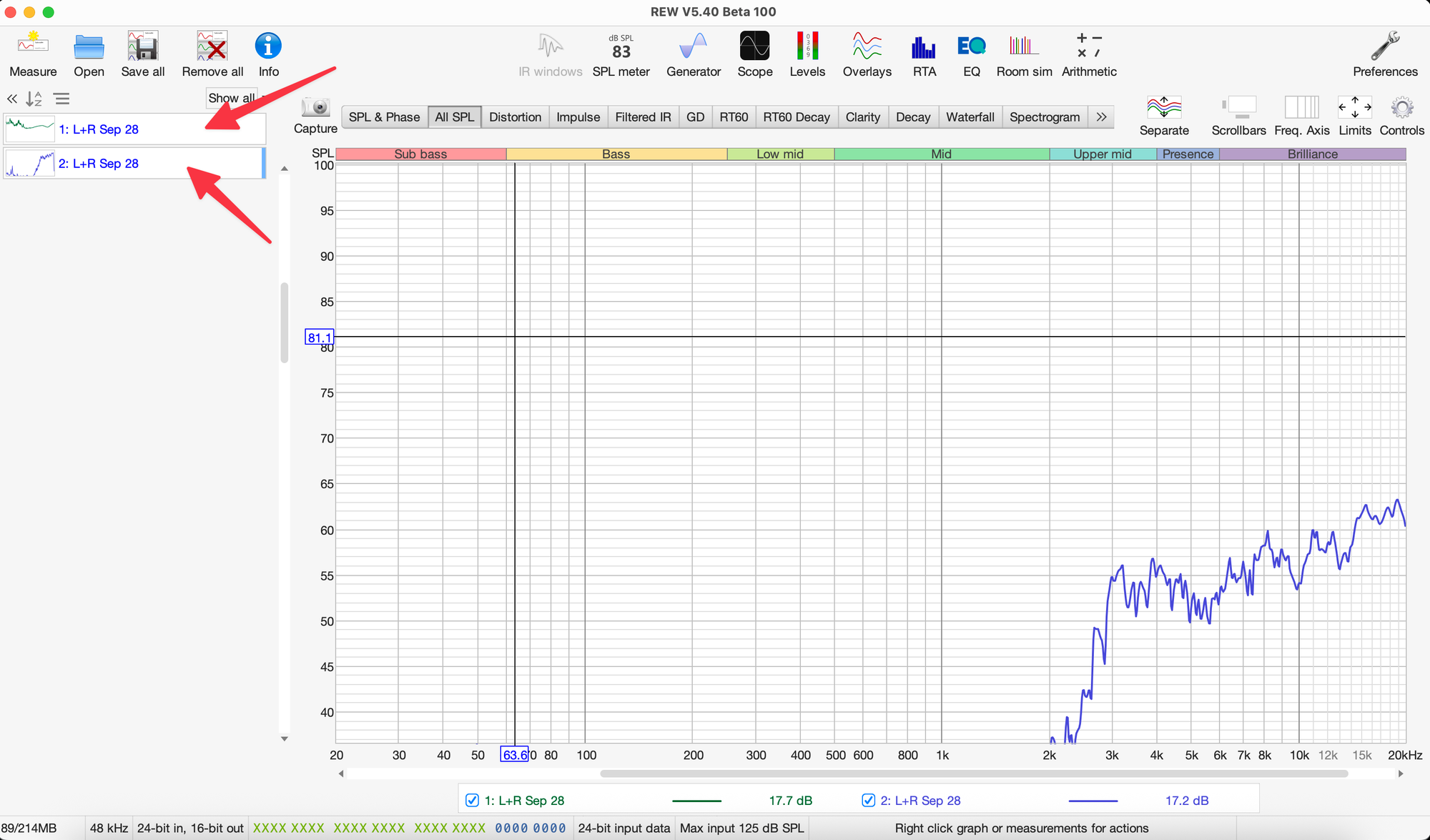
Я же обычно закрываю окно RTA, и иду переименовать сохраненный график, чтобы не запутаться. Например на скриншоте ниже у нас сохранено уже два графика: 1 - уровень шума с салоне (мы делали его замер ранее), 2 - график АЧХ левого твитера.
Использую правую кнопку мыши на каждом графике в левой панели мы можем его переименовать, чтобы не запутаться в дальнейшем:
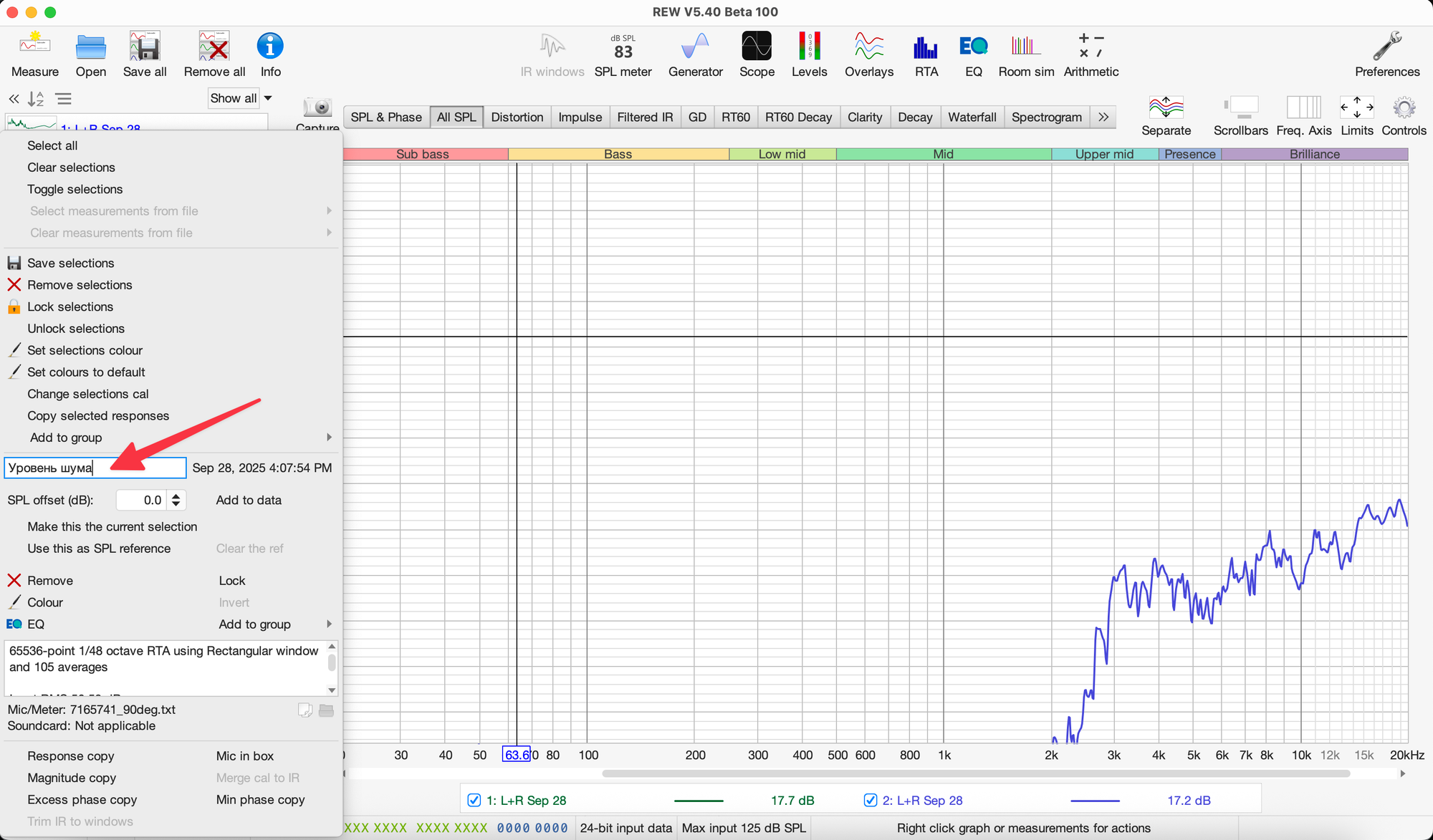
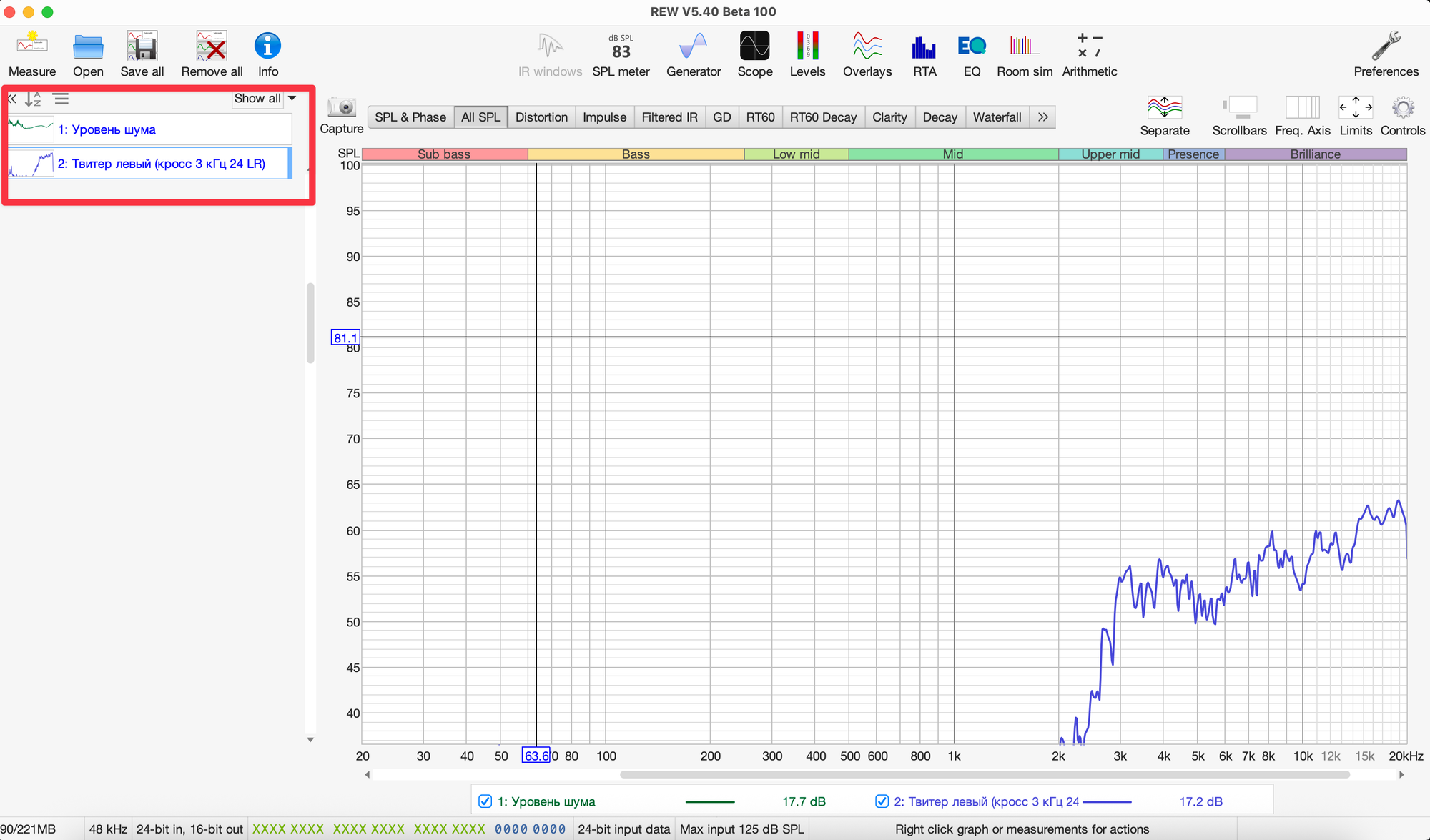
Я всегда даю понятные названия, и иногда дополнительные комментарии, например если я делаю несколько замеров одного и того же динамика с разными значениями кроссовера:
Далее открываю окно RTA и делаю замер следующего динамика.
Завершаем измерения для каждого отдельного динамика. Для сабвуфера, если он у вас один, не надо замерять оба канала, одного будет достаточно.
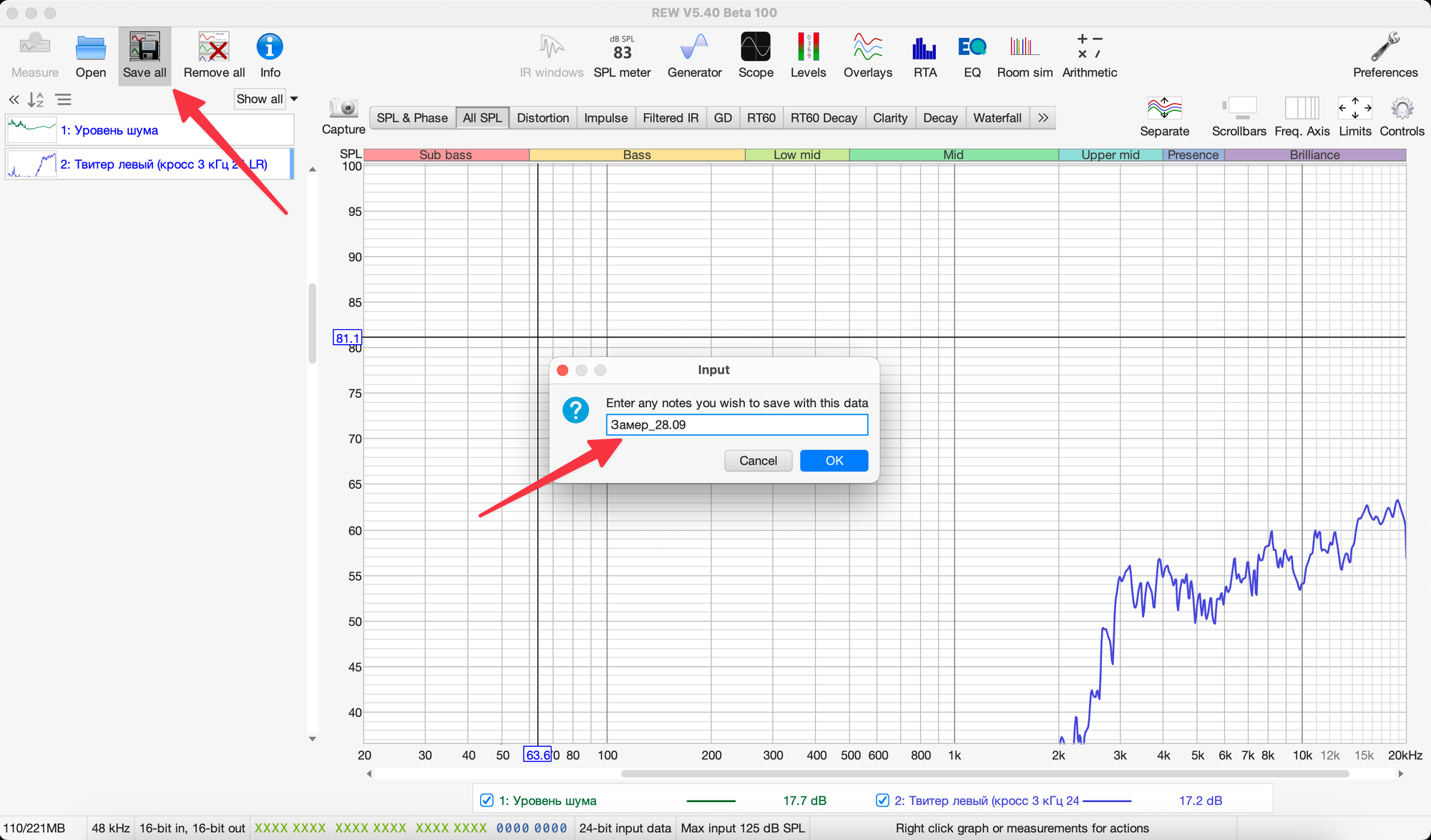
Когда все динамики замерили и задали им имена, сохраняем результаты в одном общем файле использую кнопку "Save all":
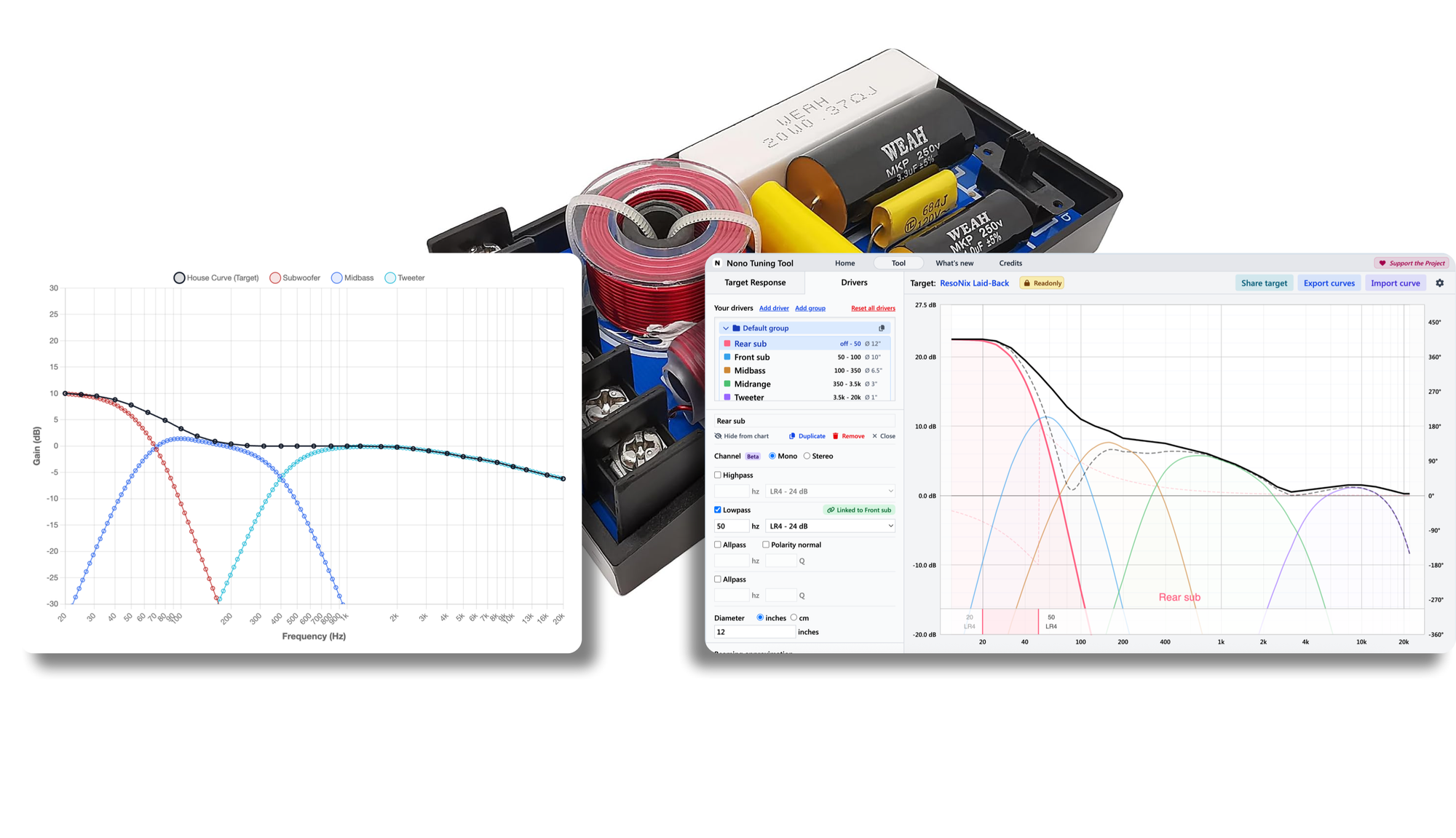
В следующей части перейдем к базовому выбору акустических кроссоверов для динамиков и целевых кривых. Определимся с общей целевой кривой, и сгенерируем целевые кривые для каждого динамика на основе выбранных кроссоверов.
Продолжить обсуждение поста в Сообществе GD Projects: